The ICEGG is at the forefront of research in positioning and navigation systems design and applications and has made significant contributions in the:
- Development of error models, and data processing software for use with GPS data.
- Design of augmentations to current satellite navigation systems for different applications.
- Design of new civil satellite based navigation systems.
- Development of GNSS failure modes and effects analysis methodology.
- Development of novel terrestrial based positioning systems.
- Identification of innovative applications and development of methods to quantify the impact of positioning and navigation systems on such applications.
Positioning and navigation research is underpinned by high quality facilities and infrastructure including terrestrial geodetic equipment, GNSS receivers, state-of-the art inhouse and commercial software, GIS platforms, an instrumented vehicle, and low and high grade navigation equipment.
Our long term strategy is to develop a number of research topics in parallel, building on our current strengths and to identify and open up new opportunities.
Research theme leader
Current research projects
Background
Over the past three decades GPS has evolved from a system designed to provide metre-level positioning for military applications to one that is used for a diverse range of unforeseen, and mainly civilian, applications. This evolution has been both driven and underpinned by fundamental research, including that carried out at UK universities, especially in the fields of error modelling, receiver design and sensor integration. However, GPS and its current augmentations still cannot satisfy the ever increasing demands for higher performance. For instance there is insufficient coverage in many urban areas, it is not accurate enough for some engineering applications such as the laying of road pavements and receivers cannot reliably access signals indoors.
However, things are changing rapidly. Over the next few years the current satellite navigation systems are scheduled to evolve into new and enhanced forms. Modernised GPS and GLONASS (Russia’s equivalent to GPS) will bring new signals to complement those that we have been using from GPS for the last 30 years. Also we have seen the early deployment of China’s Compass system closely followed by the full operational constellation with its new signals and facilities. Furthermore we will see the early deployment of Galileo satellites.
These new signals have the potential to extend the applications of GNSS into those areas that GPS alone cannot satisfy. They will also enable the invention of new positioning concepts that will significantly increase the efficiency of positioning for many of today’s applications and stimulate new ones, especially those that will develop in conjunction with the anticipated fourth generation communication networks to provide the location based services that will be essential for economic development across the whole world, including the open oceans.
The iNsight project is to extend the applications and improve the efficiency of positioning through the exploitation of new global navigation satellite systems signals. Its challenges include the need for (i) novel GNSS signal acquisition and tracking methods including the potential benefits from deep integration with other positioning sensors, (ii) end-to-end quality control and integrity monitoring based on a detailed understanding of the potential failure modes, to support mission critical applications including those with stringent time-to-alert requirements, (iii) satellite orbit and clock transformation models to ensure that new systems are interoperable in terms of their position and timing reference frames, (iv) improved multipath detection, modelling and mitigation through the use of the new signals and employing a combination of statistical modelling, antenna design, multiple frequency approaches and consistency checking, (v) better models to mitigate the effects of the ionosphere and troposphere by taking advantage of the extra signal frequencies and satellite constellations, (vi) an integrated positioning architecture with flexible algorithms that automatically combine the information from different GNSSs and other positioning sensors in an optimal manner, to ensure the highest accuracy, integrity, continuity and availability in all conditions, and (vii) a software-configurable test and demonstration platform.
Methodology
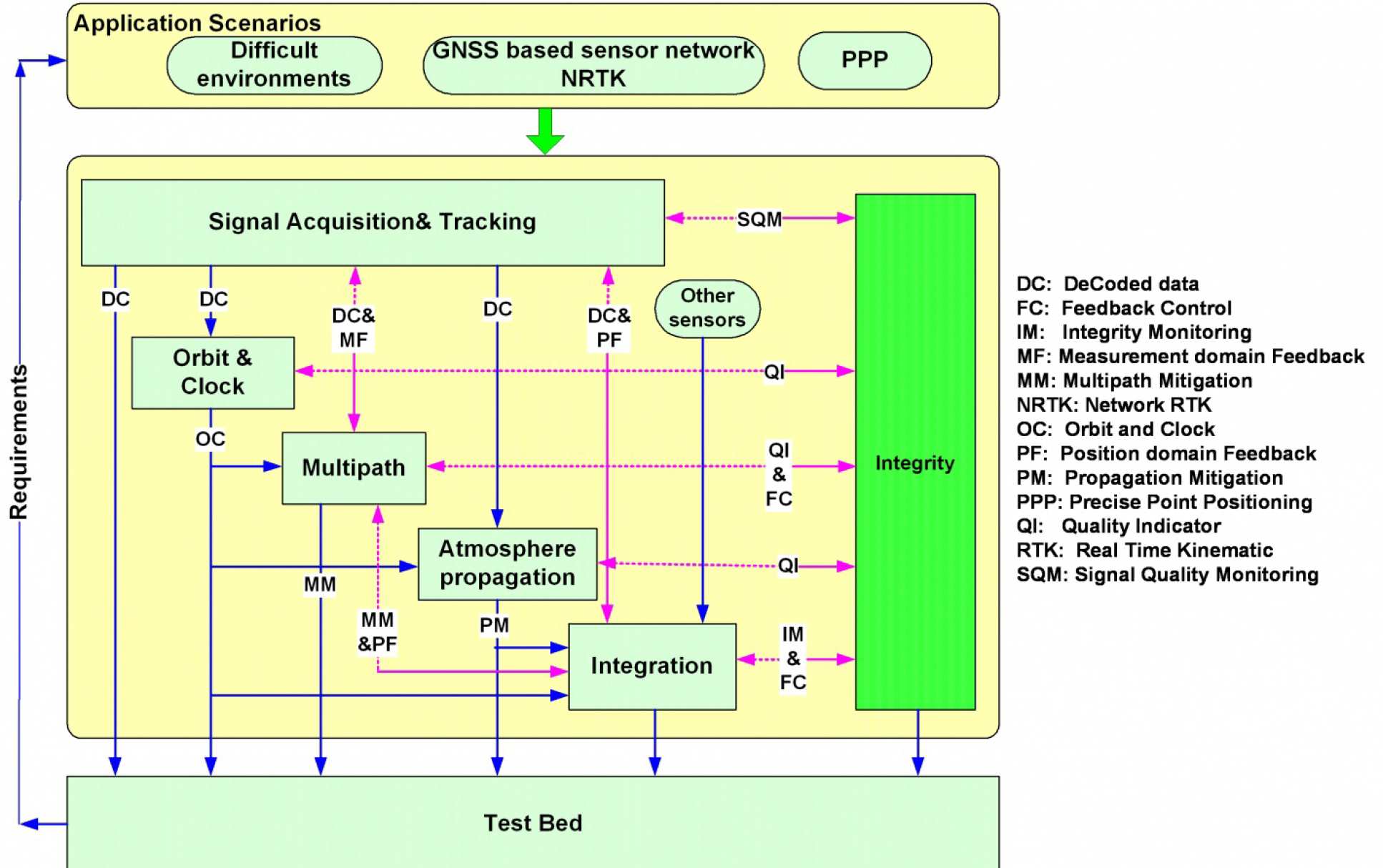
In order to demonstrate tangible benefits, particular attention is paid to how the discoveries made in addressing the challenges could enhance and enable the use of GNSS in the three specific conditions of (i) Precise Point Positioning (PPP) with carrier phase data, where extensive research is required to model the relevant error sources; (ii) GNSS based sensor networks employing carrier phase data, where substantially more sophisticated spatial and temporal elements to existing error modelling are possible; (iii) GNSS in difficult environments, where basic research is needed to develop a robust system (including both hardware and software) that can provide metre-level indoor positioning accuracy with high integrity.
This project is divided in seven technical work packages (WP) led by different university. Imperial College leads the integrity monitoring work package (WP2). The inter-operation between integrity monitoring and the others is shown in the following figure.
The quality and integrity of the output of positioning and navigation systems are crucial to mission (e.g. safety, commercial and liability) critical applications. Integrity monitoring at the user level is based on the established concept of Receiver Autonomous Integrity Monitoring (RAIM) and its variations, which exploit redundancy, geometry and measurement characteristics to check for measurement consistency to detect the presence of anomalous data. As most current algorithms have been developed for pseudorange data, this research focuses on the development of efficient methods for assessing the integrity of solutions that involve carrier phase data.
A holistic two stage integrity monitoring approach is proposed in this WP in order to support early detection of potential failures.
Ambiguity Validation stage
Employs conventional ration test statistic with a new Doubly Non-Central F distribution. It is based on the confidence level (e.g.99%) required to determine the threshold taking into account the degrees of freedom (DOF) changes and probability of missed detection.
Integrity Monitoring at the Positioning Stage
Failure detection is based on a fullset (uses all observations) test statistic and a number of subsets (variations of code and carrier). The fullset is used to detect presence of failure, while the subsets help to identify and exclude the failure. The protection level is calculated as a function of geometry, residual errors, probability of false alert, and probability of missed detection.
Collaborations / Project Partners
iNsight is a collaborative research project funded by the UK’s Engineering and Physical Sciences Research Council (EPSRC). It is being undertaken by a consortium of twelve UK university and industrial groups: Imperial College London, University College London, the University of Nottingham, the University of Westminster, EADS Astrium, Nottingham Scientific Ltd, Leica Geosystems, Ordnance Survey of Great Britain, QinetiQ, STMicroelectronics, Thales Research and Technology UK Limited, and the UK Civil Aviation Authority.
Sponsor
Engineering and Physical Sciences Research Council (EPSRC)
Project website
www.insight-gnss.org
Publications
- Jokinen A., Feng S., Milner C., Schuster W., Ochieng W., Hide C., Moore T. and Hill C.(2012), Fixed ambiguity Precise Point Positioning (PPP) with FDE RAIM, Proceeding of the IEEE/ION The Position Location and Navigation System (PLANS) Conference, Myrtle Beach, South Carolina, April 24-26, 2012.
- Jokinen A., Feng S., Milner C., Schuster W., Ochieng W., Hide C., Moore T. and Hill C.(2011), Precise Point Positioning and Integrity Monitoring with GPS and GLONASS, Proceeding of the European Navigation Conference, Grange Tower Bridge Hotel, London, 29 Nov - 1 Dec 2011
- Feng S., Milner C., Jokinen A., Ochieng W., Hide C., Moore T., Hill C., Ziebart M., Bahrami M., Groves P. and Jiang Z.(2011), A Novel Positioning and Integrity Monitoring Algorithm for a Multiple Constellation Receiver, Proceeding of the ION GNSS, Portland, OR, USA, 19-23, September, 2011
- Milner C., Feng S., Jokinen A., Ochieng W., Hide C., Moore T. and Hill C.(2011), A Holistic Approach to Carrier-Phase Receiver Autonomous Integrity Monitoring (CRAIM): Proceeding of the ION GNSS, Portla nd, OR, USA, 19-23, September, 2011
- Jiang Z., Groves P.D. , Ocheing W.Y., Feng S., Milner C.D. and Mattos P.G.(2011), Multi-Constellation GNSS Multipath Mitigation Using Consistency Checking, , Proceeding of the ION GNSS, Portland, OR, USA, 19-23, September, 2011
- Feng, S., Ochieng, W.Y.(2010), Advanced receiver level integrity monitoring algorithm for carrier phase based GNSS positioning, Proceedings of the International Symposium on Inertial Technology and Navigation, Nanjing, China,18-20 October, 2010
Completed research projects
1. Real-Time high precision positioning with satellites
This project was funded by the Nuffield Foundation, the German Mining Company, PLB and Imperial College. It developed real-time millimetric positioning/navigation techniques and algorithms using the US Global Positioning System (GPS) of satellites and the European Geostationary Navigation Overlay Service (EGNOS) satellites. In particular, the research used the extra data provided by EGNOS satellites and modelling of the navigation errors to improve the reliability and availability of kinematic positioning. The issues involved were studied at three levels: analysis of the differences between GPS and EGNOS in terms or orbital configurations, clock and orbital data representation and computation, spatial and temporal reference systems, and their impact on kinematic positioning using baselines up to 100 km; detailed analysis of relevant navigation system errors through an in-depth literature review of existing error models for atmospheric refraction and multipath; development of algorithms for integrated navigation including a local ionospheric model for the single frequency EGNOS satellite data. The results of the project are useful for high accuracy and high integrity applications such as aircraft navigation, structural deformation monitoring and transport telematics.
Sponsor: Nuffield Foundation; PLB; Imperial College London
2. Validation of EGNOS Navigation Performance Requirements
This project was carried out for AirSys ATM/Thomson-CSF (subsidiary of ALCATEL of France) to develop a pragmatic strategy for the validation of the performance of the European Geostationary Navigation Overlay Service (EGNOS). EGNOS is the European complement to the first generation global navigation satellite systems and is primarily designed to meet navigation requirements for all modes of transport.
Sponsor: AirSys ATM (Thomson-CSF)
3. EGNOS User Requirements Definition and Performance Validation
This is a European Community (EC) funded project aimed studying EGNOS (European Geostationary Navigation Overlay Service) expansion into Africa and South America. Imperial College is participating in a multinational consortium led by GMV (Spain) and is responsible for the development of algorithms and code for the validation of positioning accuracy and integrity of the service.
Sponsor: European Commission
4. Local area augmentation system for fleet management
This project was funded by LogicaCMG to specify an architecture for a local area navigation system for fleet management in urban areas. The architecture proposed consisted of the use of Medium Frequency (MF) signals generated from terrestrial MF signal generators (similar to those used for LORAN-C) to augment the signals from the space based navigation systems such as GPS, GLONASS and GALILEO.
Sponsor: LogicaCMG
5. GALILEO System Definition - GPS Integrity Monitoring Assessment
This research was carried out to define the integrity monitoring concept for the Global Positioning Satellites (GPS) within the proposed GALILEO system. The research addressed the impact of the GPS constellation on performance (in terms of accuracy and integrity), were it to be used as part of the GALILEO system. The work was carried out in two stages. Firstly, a detailed analysis of the technical and institutional evolution (modernisation) of the GPS and the definition of the potential user services for a combined GPS/Galileo navigation system. Since the Galileo system is expected to achieve its full operational capability (FOC) by the year 2008, the GPS system was extrapolated to the same year. Secondly, taking into account the user services identified and the technical and institutional evolution (modernisation) of GPS, an optimal approach to the integrity monitoring scheme to be implemented within the GALILEO architecture to provide integrity data for GPS satellites, was defined. The research also quantified the impact of the inclusion of GPS on integrity monitoring at the user sensor (receiver) level.
Sponsor: Alcatel Space Industrie (ASPI)
1. Space-based dynamic positioning in built-up environments
This research project was funded by Transport for London (TfL) to contribute to the review of the Countdown Bus Information System operated. The project assessed the capability of stand-alone and augmented navigation space-based systems to support the navigation functionality of the Countdown system. Currently, the system uses roadside beacons and distance information from odometer to determine the location of buses. Research is continuing to investigate data fusion techniques involving the integration of GNSS with low-cost MEMS technology sensors to enable required navigation performance in built-up areas.
Sponsor: Eurocontrol; DERA (Qinetiq)
2. GPS Integrity and potential impact on aviation safety
The objective of this project was to study the strengths and weaknesses of the global positioning system (GPS) of satellites as a navigation tool for civil aircraft. The study will quantified the level of integrity (safety) afforded by GPS both at system and user levels, related this to civil aircraft navigation requirements and finally, proposed techniques for improving the performance of GPS to meet the requirements. The project was supported by the Civil Aviation Authority and will contribute to the long-term programme on hazard analysis of navigation systems for civil aircraft.
Sponsor: The UK Civil Aviation Authority (CAA)
3. Structural stability monitoring using satellite positioning systems and GIS
The objective of this project is to specify and demonstrate a system architecture for structural deformation monitoring based on satellite positioning and geographical information systems technologies, and to develop methods for using this data to understand structural behaviour. The work requires a multi-disciplinary approach combining advanced satellite positioning and geographical information systems technologies with background in structural analysis and assessment as well as external input from practicing engineering firms. The project is being undertaken with the support of English Heritage.
Sponsor: English Heritage
4. Determination of the effects of GPS performance and failures on aviation applications
The aim of the project is to answer the question - how do GPS Signal-In-Space anomalies, GPS receiver failures, and abnormal events (e.g. interference, ionospheric effects or satellite outages) affect navigation performance of an aircraft, and how does an air traffic service deal with such events in the operational environment? The initial phase of this has already been completed having identified the failure modes (or anomalies) and models. Phase 2 is developing improved anomaly protection (or integrity) algorithms to be used in the assessment their effect on the navigation performance of an aircraft. The final phase will then address how air traffic service providers deal with the effects in Phase 2. The research is being carried out by Imperial, University of Leeds and Helios Technology.
Sponsor: UK Civil Aviation Authority (CAA)
5. Integration of GNSS with Low-cost Dead Reckoning sensors for continuous navigation
This research project will contribute to the realization of high accuracy high integrity lower-cost seamless positioning in all conditions and environments. It will develop techniques and algorithms to integrate space-based positioning systems with low-cost micro-electromechanical sensor (MEMS) dead reckoning (motion) sensors.
Sponsor: Imperial College London; EPSRC
6. Review and definition of integrity algorithms for the GALILEO system
This research project carried out a detailed review of the existing algorithms for the monitoring of the quality (integrity) of the GALILEO navigation system, and developed investigated new approaches for the determination of the errors in the offset of the Galileo Sensor Station (receiver) clocks from the GALILEO System Time (GST). The error in the estimation of the clock offset is a key parameter in the integrity chain. The work was carried out by IC Consultants Limited and involved close collaboration between the Engineering Geomatics Group (ICEGG) at Imperial and the Department of Geomatic Engineering at UCL. The work was part of LogicaCMG’s contribution to Phase C0 of the GALILEO development programme.
Sponsor: LogicaCMG
7. Robust statistical framework for monitoring the integrity of space-based navigation systems, and preparing the marketplace for integrity-based services
Integrity monitoring of satellite navigation systems such as the Global Positioning System (GPS) offers a level of protection against potentially hazardous failures or malfunction. Existing integrity monitoring approaches rely heavily on statistical assumptions regarding the characteristics of the residual navigation errors after various error modelling and mitigation schemes have been applied. Some studies have pointed to the fact that in practice, residual navigation errors although not very different from normal laws, may neither have normal tails nor zero mean. Furthermore, there has been insufficient data to demonstrate the nature of the distribution. The aim of this PhD research project is to test the assumption that residual navigation errors come from a normally distributed population with z ero mean. Re al GPS data from around the world will be used to test the statistical assumptions underpinning current methods with the objective of specifying a new and robust statistical framework that takes into account the spatio-temporal characteristics associated with the residual navigation errors. The research will follow this by studying the potential user services to be supported by systems employing the new statistical framework.
Sponsor: Imperial College, EPSRC and LogicaCMG
8. GAARDIAN (GNSS Availability, Accuracy, Reliability anD Integrity Assessment for Timing and Navigation)
The GAARDIAN project will create a mesh of remote Positioning, Navigation and Timing (PNT) Interference Detection and Mitigation (IDM) sensors. These sensors will be deployed in mission critical environments and in the vicinity of PNT dependent infrastructure and applications. Specifically, they will monitor the Required Navigation Performance (RNP) parameters (i.e. accuracy, integrity, continuity and availability) of the locally received GPS (or other GNSS) and eLoran signals on a 24x7 basis and report back to a central server. The user will be alerted in near real-time to any anomalous behaviour in either of the two PNT signals. The IDM sensors will be configurable according to the user requirements. The users will access the data over the internet from a secure server environment, thus enabling continuous monitoring from any internet enabled terminal. Likely phenomena or threats to PNT services include jamming, general interference, multipath from local reflections, space environment or weather related events and satellite or transmitter malfunction. Traditionally, it has been very difficult to analyse the specific nature of interference to a PNT signal, when monitoring one signal alone, e.g. GPS. By using the technically dissimilar eLoran signal plus a terrestrial timing reference, and continually analysing key data, the RNP parameters associated with either signal can be recorded with high confidence. Likely applications will include homeland security, transport users such as harbours, airports, roads and railways, emergency services, military, utilities, scientific community, telecom infrastructure and any safety or mission critical application leveraging PNT signals.
Sponsor: Engineering and Physical Sciences Research Council (EPSRC)
9. Review to identify and select a GPS device to trial for use in the National Travel Survey
The objective of this project is to identify candidate GPS based devices for the capture of National Travel Survey (NTS) data. The methodology includes a detailed literature review, augmented with the surveys of manufacturers and past users, and the application of reliable analysis techniques (based on pre-determined criteria). The project is supported by the UK Department for Transport (DfT) and involves collaboration with AECOM Ltd.
Sponsor: DfT
1. Robust navigation algorithms for aircraft precision approach and landing using global satellite navigation systems
This research proposes to investigate ways of using the new signals (in addition to the development of various models for the error sources) proposed as part of the modernization of GPS and the new systems under development including EGNOS (the European Geostationary Navigation Overlay Service) and Galileo to characterize the levels of performance achievable with the carrier phase measurements and to correlate this with aircraft precision approach and landing requirements. Hybridisation with other non-space based sensors such INS (Inertial Navigation Systems) will also be explored. The integration of data from different systems should enable high integrity, continuity of service and availability.
Sponsor: Universities UK and Imperial College London
2. Determination of carrier phase observation ambiguity applying EGNOS message for precise point positioning
The objective of this project is to improve the performance of precise point positioning (PPP) which is based on the processing of un-differenced pseudorange and carrier phase observations from a single GPS receiver. The newly available EGNOS post-processed and real-time messages will be applied to describe and reduce the errors of the satellite based positioning. A new algorithm of the carrier phase ambiguity determination is to be developed. And finally the performance of this EGNOS aided PPP algorithm is to be evaluated. The work requires a good understanding of the current PPP algorithms and the modelling of error sources of satellite based positioning. The access and applications of the EGNOS messages need to be authorised by ESA.
3. Seamless Positioning in All Conditions and Environments
Satellite positioning via Global Navigation Satellite Systems (GNSS) such as GPS have been adopted in a wide range of applications including multi-modal transport navigation; synchronisation of telecommunications networks; geodetic survey; and asset management systems. However, to access increased accuracy, integrity and availability, the various weaknesses inherent in such systems such as signal attenuation and masking; error modelling and integrity monitoring must be addressed. This proposal will address these weaknesses and deliver 'Centimetres Everywhere' with the appropriate levels of integrity for different applications. This is to be achieved through research leading to higher sensitivity algorithms for signal acquisition and tracking in harsh environments; exploitation of new signals; sensor error modelling; robust integrity monitoring algorithms; and the combined usage or integration of different sensor and data sources. It is envisaged that the models and algorithms developed will eventually be implemented in a 'test bed' whose requirements and architecture will be carried out within this project. The test bed is to be built in a subsequent project. The current vision is that the test bed should provide a benchmark for testing and referencing purposes. As a result, it will adopt as far as possible, an open architecture, to enable individual sensors to be added/removed/replaced as required. The SPACE research team consists of Imperial College London, University of Nottingham, University of Leeds and UCL, and in collaboration with the main companies and government agencies in the field of positioning and navigation.
Sponsor: EPSRC; UK Industry
4. Free Network Mobile People and Product Location for Enhanced Personal and Property Security
The aim of this project is to develop a low-cost system capable of providing continuous tracking of people and property in all environments. The key objective will be to develop a system to locate ad-hoc networks of mobile users and equipment using current or near future wireless radio enabled equipment. The 'nodes' of the network could be people with suitably equipped mobile phones (or simple tags) or equipment (such as PCs, printers, etc.) with wireless radio connections. The location network should expand and contract 'organically' so that no central control points are required. In this way 'bottle-necks' in the system will be avoided when there are many users and location can be performed very quickly. The research is being carried out by Imperial and University of Leeds in collaboration with New Forrest Communications Limited, the Police Scientific Development Branch and the Forensic Science Services.
Sponsor: EPSRC; Police Scientific Development Branch (PSDB); Forensic Science Services (FSS); New Forest Communications Limited
5. Reliable map-matching algorithms for land transport applications
A range of transport telematics applications and services require continuous and accurate positioning information of the vehicles travelling on the road network. Two types of information are essential for such telematics applications and services. These are the determination of the vehicle position and the determination of the physical location of the vehicle on the road network. The most common devices used for vehicle positioning are based on GPS, Dead-Reckoning (DR) sensors, Map Matching (MM) and microwave beacons. The use of these devices either in isolation or combination depends on the Required Navigation Performance (RNP) parameter specifications (accuracy, integrity, continuity and availability). Furthermore, the capability to identify the physical location of a vehicle is a key requirement in transport telematics applications. In order to achieve the RNP, system and sensor complementarity, such as in the case of the integration of GPS, DR and digital map data could be used to enhance geometric positioning capability. MM not only enables the physical location of the vehicle to be identified but also improves the positioning capability if a good digital map is available. This research is developing novel map-matching algorithms that exploit all available information (quantitative and qualitative). Fuzzy logic techniques are used to address some of the vague qualitative information available.
Sponsor: Imperial College London
6. Airborne New and Advanced Satellite techniques & Technologies in A System Integrated Approach (ANASTASIA)
The aim of Anastasia is to study on board space based Navigation and Communication technologies that should become available for aircraft between 2010 and 2020. The project will contribute to developing standards, and provide advanced insights into the optimal architectures and technologies for next generation navigation and communication architectures on-board aircraft. The consortium of European industry and research organisations is led by Thales. Imperial will lead the work to develop a navigation architecture and algorithms that exploit multi-constellation, multi-frequency space-based positioning systems, state-of-the art electro-mechanical motion sensors and spatial databases.
Sponsor: European Commission (FP6)
7. Robust statistical framework for monitoring the integrity of space-based navigation systems, and preparing the marketplace for integrity-based services
Integrity monitoring of satellite navigation systems such as the Global Positioning System (GPS) offers a level of protection against potentially hazardous failures or malfunction. Existing integrity monitoring approaches rely heavily on statistical assumptions regarding the characteristics of the residual navigation errors after various error modelling and mitigation schemes have been applied. Some studies have pointed to the fact that in practice, residual navigation errors although not very different from normal laws, may neither have normal tails nor zero mean. Furthermore, there has been insufficient data to demonstrate the nature of the distribution. The aim of this PhD research project is to test the assumption that residual navigation errors come from a normally distributed population with z ero mean. Real GPS data from around the world will be used to test the statistical assumptions underpinning current methods with the objective of specifying a new and robust statistical framework that takes into account the spatio-temporal characteristics associated with the residual navigation errors. The research will follow this by studying the potential user services to be supported by systems employing the new statistical framework.
Sponsor: Imperial College, EPSRC and LogicaCMG
8. GAARDIAN (GNSS Availability, Accuracy, Reliability anD Integrity Assessment for Timing and Navigation)
The GAARDIAN project will create a mesh of remote Positioning, Navigation and Timing (PNT) Interference Detection and Mitigation (IDM) sensors. These sensors will be deployed in mission critical environments and in the vicinity of PNT dependent infrastructure and applications. Specifically, they will monitor the Required Navigation Performance (RNP) parameters (i.e. accuracy, integrity, continuity and availability) of the locally received GPS (or other GNSS) and eLoran signals on a 24x7 basis and report back to a central server. The user will be alerted in near real-time to any anomalous behaviour in either of the two PNT signals. The IDM sensors will be configurable according to the user requirements. The users will access the data over the internet from a secure server environment, thus enabling continuous monitoring from any internet enabled terminal. Likely phenomena or threats to PNT services include jamming, general interference, multipath from local reflections, space environment or weather related events and satellite or transmitter malfunction. Traditionally, it has been very difficult to analyse the specific nature of interference to a PNT signal, when monitoring one signal alone, e.g. GPS. By using the technically dissimilar eLoran signal plus a terrestrial timing reference, and continually analysing key data, the RNP parameters associated with either signal can be recorded with high confidence. Likely applications will include homeland security, transport users such as harbours, airports, roads and railways, emergency services, military, utilities, scientific community, telecom infrastructure and any safety or mission critical application leveraging PNT signals.
Sponsor: Engineering and Physical Sciences Research Council (EPSRC)
9. Review to identify and select a GPS device to trial for use in the National Travel Survey
The objective of this project is to identify candidate GPS based devices for the capture of National Travel Survey (NTS) data. The methodology includes a detailed literature review, augmented with the surveys of manufacturers and past users, and the application of reliable analysis techniques (based on pre-determined criteria). The project is supported by the UK Department for Transport (DfT) and involves collaboration with AECOM Ltd.
Sponsor: DfT
Contact us
ICEGG
Centre for Transport Engineering and Modelling (CTEM)
Department of Civil and Environmental Engineering
Skempton Building,
South Kensington Campus
Imperial College London
London, SW7 2AZ, United Kingdom