Supervisors: Mr Graham Gosling, Dr Paul Hooper
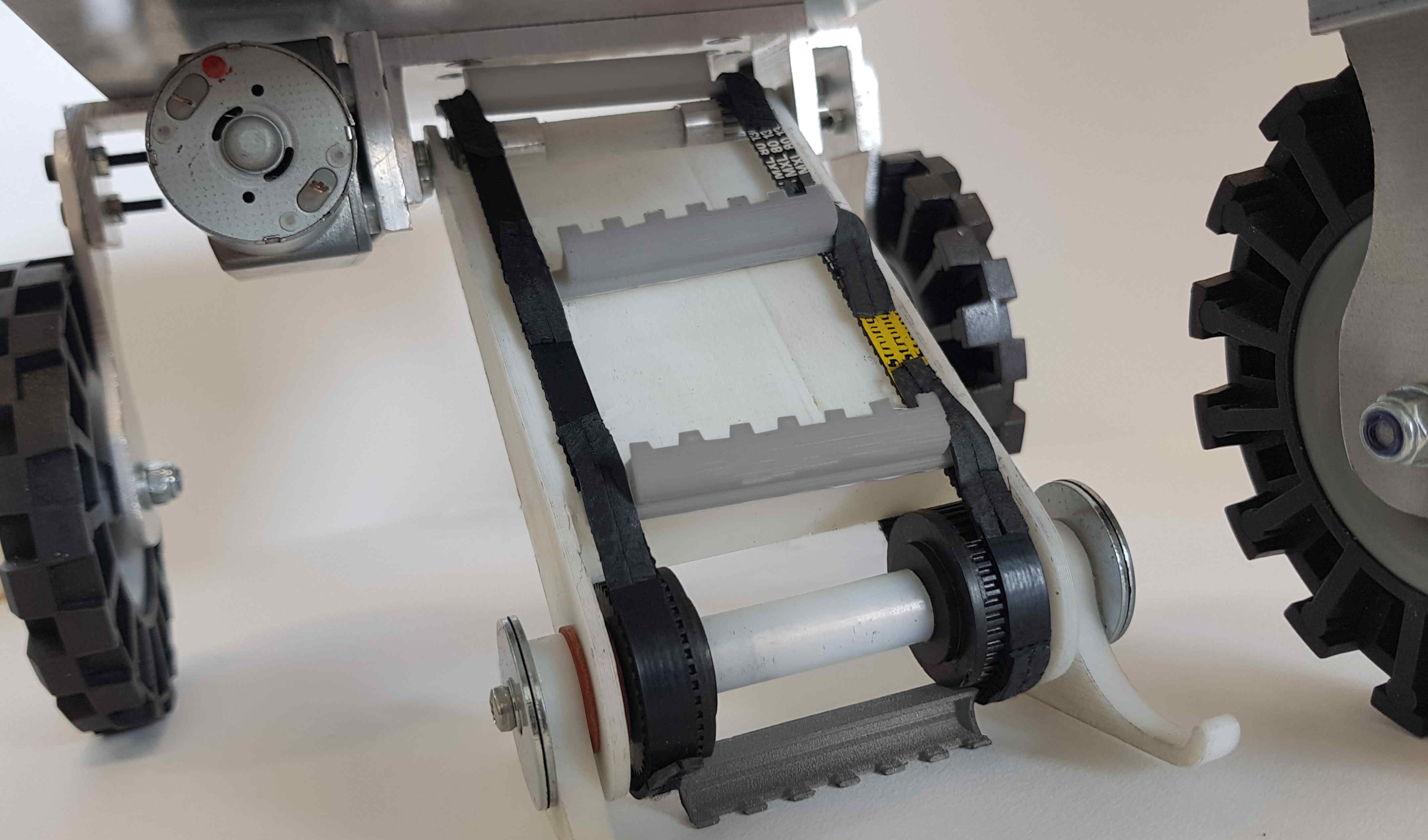
The task for this DMT project was to design, develop and test the sample collection and storage method for the Imperial College Students for the Exploration and Development of Space (ICSEDS) rover. The rover must be remotely controlled over a pre-set terrain at a test site where it must collect, store and retrieve soil samples. This requires the product to collect up to 500 g of lunar soil and dry ice within the time limit and to store it for the return journey. All mechanisms and attachments to the rover must also be able to withstand the forces associated with a vibrations test which simulates a rocket launch (±3g at 100 Hz). In order to achieve an optimised and successful soil sampling method which meets the design constraints, an iterative design process has been implemented with multiple prototypes made and tests conducted to ensure proof of concept of all aspects of the design.
This project contributed to the Imperial entry in the UK Students for the Exploration and Development of Space (UKSEDS) Lunar Rover Competition, which won first prize as well as an additional prize for the best Critical Design Review in July 2018.
Team: Abdelgader Eldaw, Aditya Koirala, Deane Harris-Snowdon, Matthew Homburg, Roshan Hansla

Team: Abdelgader Eldaw, Aditya Koirala, Deane Harris-Snowdon, Matthew Homburg, Roshan Hansla

Team: Abdelgader Eldaw, Aditya Koirala, Deane Harris-Snowdon, Matthew Homburg, Roshan Hansla



