Revolutionary robots guided by real-time 3D magnetic resonance imaging (MRI) scanning would enable reliable and precise minimally invasive operations with minimal recovery time. On the other hand, using a robotic interface in conjunction with functional MRI (fMRI) would enable neuroscientists to 'view' and investigate the brain mechanisms involved in performing tasks with arbitrary dynamics.
There is, however, a major problem for robots working within an MRI environment: conventional materials, actuators and sensors interfere with the static magnetic field, switching magnetic field gradients and radio frequency (RF) signals generated by the MR scanner.
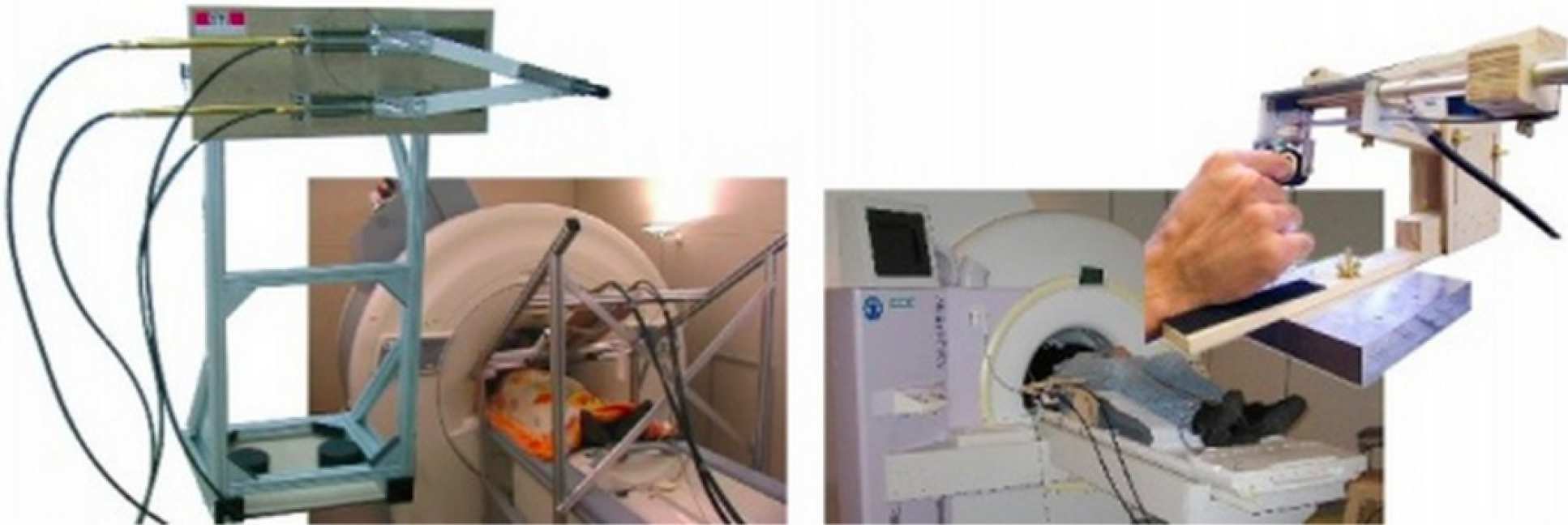
With the group of Hannes Bleuler at EPFL (in particular with Roger Gassert, Ganesh Gowrishankar and Dominique Chapuis), we have developed a comprehensive robot technology compatible with MRI and fMRI, i.e. actuators, sensors, electronic hardware and software able to exert computer-controlled force/torque simultaneously to the imaging.
These manipulators are safe and smooth enough to interact with human motion. We have developed several haptic interfaces to investigate the control of wrist, arm and finger movements as well as tactile sensing, for neuroscience groups in Europe and Japan. We have also developed a technique to attenuate movement artifact in fMRI.
We are now developing dedicated interfaces to study the development of sensorimotor control in neonates, as well the neural correlates of pain.
Related publications
- R Moser, R Gassert, E Burdet, L Sache, HR Woodtli, J Erni, W Maeder, and H Bleuler. An MR compatible technology. Proc IEEE International Conference on Robotics and Automation (ICRA) 1: 670-5, 2003.
- G Ganesh, R Gassert, H Bleuler, and E Burdet. Dynamics and control of an MRI compatible master-slave system with hydrostatic transmission. Proc IEEE Int Conference on Robotics and Automation (ICRA) 2: 1288-94, 2004.
- L Dovat, R Gassert, D Chapuis, G Ganesh, E Burdet and H Bleuler. A Haptic Interface based on Potential Mechanical Energy to Investigate Human Motor Control using fMRI. Proc IEEE Engineering in Medicine and Biology Conference (EMBC) 5021-4, 2005.
- D Chapuis, R Gassert, G Ganesh, E Burdet and H Bleuler. Investigation of a cable transmission for the actuation of MR compatible haptic interfaces, Proc IEEE / RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob) 426-31, 2006.
- R. Gassert, R. Moser, E. Burdet and H. Bleuler. An MRI/fMRI compatible robotic system with force-feedback for interaction with human motion. IEEE/ASME Transactions on Mechatronics 11(2): 216-24, 2006.
- R Gassert, L Dovat, O Lambercy, Y Ruffieux, D Chapuis, G Ganesh, E Burdet and H Bleuler. A 2-DOF fMRI compatible haptic interface to investigate the neural control of arm movements. Proc IEEE International Conference on Robotics and Automation (ICRA) 3825-31, 2006.
- E Burdet, R Gassert, G Ganesh, D Chapuis and H Bleuler. fMRI compatible haptic interfaces to investigate human motor control. In M Ang and O Khatib editors, Springer Tracts in Advanced Robotics vol 2(II) on Human-Centered Robotics, Springer, 25-34, 2006.
- D. Chapuis, R. Gassert, E. Burdet and H. Bleuler. Hybrid ultrasonic motor and electrorheological clutch system for mr-compatible haptic rendering. Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2006.
- R. Gassert, A. Yamamoto, D. Chapuis, L. Dovat, H. Bleuler and E. Burdet. Actuation methods for applications in MR environments. Concepts in Magnetic Resonance Part B: Magnetic Resonance Part B: Magnetic Resonance Engineering 29B: 191-209, 2006.
- R Gassert, E Burdet, H Chinzei. MR robotics: a critical tool for image guided interventions, clinical diagnostics and neuroscience. IEEE Engineering in Medicine and Biology Magazine 3: 12-4, 2008 (Guest Editor, special issue on MRI-Compatible Robotics).
- R Gassert, E Burdet, H Chinzei. Opportunities and challenges of MRI-compatible robotics. IEEE Engineering in Medicine and Biology Magazine 3: 15-22, 2008.
- R Gassert, D Chapuis, H Bleuler and E Burdet. Sensors for applications in magnetic resonance environments. IEEE/ASME Transactions on Mechatronics 13(3): 335-44, 2008.
- T Lemmin, G Ganesh, R Gassert, E Burdet, M Kawato and M Haruno. Model based attenuation of movement artifacts in fMRI. Journal of Neuroscience Methods 192(1): 58-69, 2010.
- AG Allievi, A Melendez-Calderon, T Arichi, D Edwards and E Burdet. An fMRI compatible wrist robotic interface to study brain development in neonates. Annals of Biomedical Engineering 41(6): 1181-92, 2013.
- AG Allievi, T Arichi, AL Gordon and E Burdet. Technology-aided assessment of sensorimotor function in early infancy. Frontiers in neurology 5: 197, 2014.
-
F Riillo, C Bagnato, AG Allievi, A Takagi, L Fabrizi, G Saggio, T Arichi and E Burdet. A simple fMRI compatible robotic stimulator to study the neural mechanisms of touch and pain. Annals of biomedical engineering 44(8): 2431-41, 2016.