While muscles are noisy and compliant actuators, humans are able to skillfully manipulate objects and perform dynamically complex tasks. In particular, it is critical to understand i) how humans apply forces to interact with their environment and ii) how they deal with unstable situations in everyday life despite large motor noise, for example when working with tools.
In 2000 we showed (with Theodore Milner, Osu Rieko, Kawato Mitsuo and David Franklin) that the nervous system can control muscles to produce appropriate force and appropriate resistance to perturbation (mechanical impedance), at minimal metabolic cost.
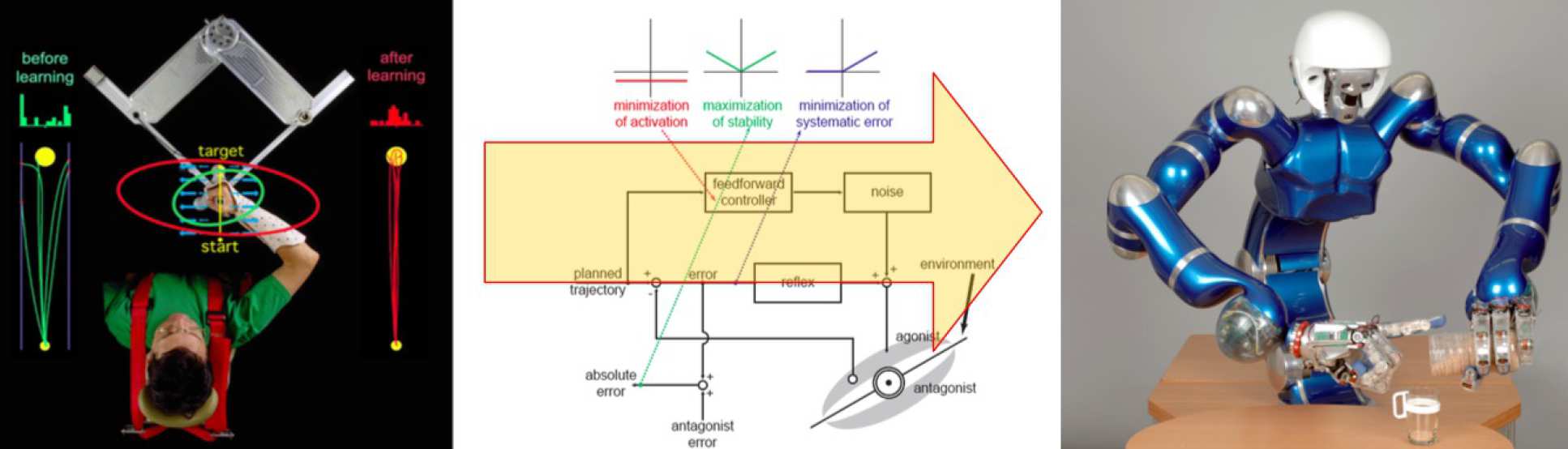
The experiment schematised in the left panel above provided the first clear evidence for the important impedance control hypothesis of Neville Hogan. In the next five years, we have further shown that impedance control is selectively tuned to multiple directions of movement and that (long delay) reflexes contribute to impedance adaptation. Recently, Atsushi Takagi's experiment showed how, to control the force and stiffness at the hand, muscles' activity shifts the equilibrium position.
Using one of the functional magnetic resonance imaging (fMRI) compatible robotic interfaces we have pioneered, we identified (with Ganesh Gowrishankar and Haruno Masahiko) the fMRI correlates of force and impedance control.
To understand the learning of force and impedance in humans, we developed (with with Tee Keng Peng and David Franklin) a computational model of motor learning which can predict how sensory information is used to modify the motor commands to muscles during the whole learning process.
This model led to the first robotic controller able to adapt to unknown unstable interactions such as during drilling or cutting (realised by Ganesh Gowrishankar, Yang Chenguang, Nathanael Jarrasse) as well as haptic exploration of mechanically unknown environments (also with Li Yanan). Through implementations on industrial robots and novel variable impedance actuators, we were able to demonstrate its adaptation capabilities to unknown environments and interacting humans.
An overview of this project can be found in these two book chapters:
E Burdet, G Ganesh, C Yang, A Albu-Schaeffer (2013), Learning Interaction Force, Impedance and Trajectory: by Humans, for Robots. In Oussama K, Vijay K, Gaurav S, The 12th International Symposium on Experimental Robotics. Springer Tracts in Advanced Robotics 79, ISBN 978-3-642-28571-4.
Y Li, N Jarrasse and E Burdet (2017), Versatile interaction control and haptic identification in humans and robots. In J-P Laumond Ed, Geometric and Numerical Foundations of Movements, Springer.
and in this book:
E Burdet, DW Franklin and TE Milner (2013), Human Robotics: neuromechanics and motor control. MIT Press.
Related publications
E Burdet, R Osu, DW Franklin, TE Milner and M Kawato (2000), A method for measuring hand stiffness during multi-joint arm movements. Journal of Biomechanics 33: 1705-09.
E Burdet, R Osu, DW Franklin, TE Milner, M Kawato (2001), The CNS skillfully stabilizes unstable dynamics by learning optimal impedance. Nature 414: 446-9.
DW Franklin, E Burdet, R Osu, M Kawato and TE Milner (2003), Functional significance of stiffness in adaptation of multijoint arm movements to stable and unstable dynamics. Experimental Brain Research 151: 145-57.
R Osu, E Burdet, DW Franklin, TE Milner, M Kawato (2003), Different mechanisms in adaptation to stable and unstable dynamics. Journal of Neurophysiology 90(5): 3255-69.
DW Franklin, R Osu, E Burdet, M Kawato and TE Milner (2003), Adaptation to stable and unstable dynamics achieved by combined impedance control and inverse dynamics model. Journal of Neurophysiology 90(5): 3270-82.
KP Tee, E Burdet, CM Chew and TE Milner (2004), A model of endpoint force and impedance in human arm movements, Biological Cybernetics 90: 368-75.
E Burdet, KP Tee, I Mareels, TE Milner, CM Chew, DW Franklin, R Osu and M Kawato (2006), Stability and learning in human arm movements. Biological Cybernetics 94: 20-32.
DW Franklin, G Liaw, TE Milner, R Osu, E Burdet and M Kawato (2007), The end-point stiffness of the arm is directionally tuned to instability in the environment. Journal of Neuroscience 27(29): 7705-16.
DW Franklin, U So, E Burdet and M Kawato (2007), Visual feedback is not necessary for the learning of novel dynamics. PLoS ONE 2(12): e1336. doi:10.1371/journal.pone.0001336.
Q Zeng, E Burdet, B Rebsamen and CL Teo (2008), Collaborative path planning for a robotic wheelchair, Disability and Rehabilitation: Assistive Technology 3(6): 315-24.
KP Tee, DW Franklin, T Milner, M Kawato and E Burdet (2010), Concurrent adaptation of force and impedance in the redundant muscle system. Biological Cybernetics 102: 31-44.
G Ganesh, A Albu-Schaeffer, M Haruno, M Kawato and E Burdet (2010), Biomimetic motor behavior for simultaneous adaptation of force, impedance and trajectory in interaction tasks. Proc IEEE Int Conf on Robotics and Automation 2705-11 (ICRA).
C Yang, G Ganesh, S Haddadin, S Parusel, A Albu-Schaeffer and E Burdet (2011), Human like adaptation of force and impedance in stable and unstable interactions, IEEE Transactions on Robotics 27(5): 918-30. (2011 King-Sun Fu Memorial IEEE Transactions on Robotics Best Paper Award).
A Kadiallah, G Liaw, M Kawato, DW Franklin and E Burdet (2011), Impedance control is selectively tuned to multiple directions of movement. Journal of Neurophysiology 106(5): 2737-48.
M Haruno, G Ganesh, E Burdet and M Kawato (2012), Distinct neural correlates of reciprocal- and co-activation of muscles in dorsal and ventral premotor cortices. Journal of Neurophysiology 107: 126-33.
A Kadiallah, DW Franklin and E Burdet (2012), Generalization in adaptation to stable and unstable dynamics. PLoS ONE 7(10): e45075. doi:10.1371/journal.pone.0045075.
G Ganesh, N Jarrasse, S Haddadin, A Albu-Schaeffer and E Burdet (2012), A versatile biomimetic controller for contact tooling and tactile exploration. Proc International Conference on Robotics and Automation (ICRA).
SH Zhou, D Oetomo, Y Tan, E Burdet, I Mareels (2012), Modelling individual human motor behaviour through model reference iterative learning control. IEEE Transactions on Biomedical Engineering 59(7): 1892-901.
Y Li, G Ganesh, N Jarrasse, S Haddadin, A Albu-Schaeffer and E Burdet (2018), Force, impedance, and trajectory learning for contact tooling and haptic identification. IEEE Transactions on Robotics 34(5): 1170-82.
H-Y Huang, A Arami, I Farkhatdinov, D Formica and E Burdet (2020), The influence of posture, applied force and perturbation direction on hip joint viscoelasticity. IEEE Transactions on Neural Systems and Rehabilitation Engineering 28(5): 1138-45.
B Berret, A Conessa, N Schweighofer and E Burdet (2021), Stochastic optimal feedforward-feedback control determines timing and variability of arm movements with or without vision. PLOS Computational Biology 17(6): p.e1009047.
A Takagi, E Burdet and Y Koike (2024), The control of the arm’s equilibrium position. Journal of Neurophysiology 131(4): 750-6.