Nature offers fascinating examples of soft continuum bodies such as in octopus, Chameleon tongue, snakes, and the elephant trunk that perform clever actions in natural enviornment. How do they simpify hyper-redundant kinematics and complex dynamics? What can we learn from them to make useful soft robots? How can we develop stiffness control mechanisms to match their range? Here are some of our publications in this area:
- Hadi Sadati, Ali Shiva, Daniel Rucker, Christos Bergeles, Ian Walker, Helmut Hauser, Kaspar Althoefer, and Thrishantha Nanayakkara, “Real-time Shape and Tip Force Estimation of a Continuum Appendage from Base Load Readings: A Stiffness Imaging Application”, IEEE International Conference on Robotics and Automation (ICRA) 2020.
- Seyedmohammadhadi Sadati, Ali Shiva, Nicolas Herzig, Caleb Rucker, Helmut Hauser, Ian Walker, Christos Bergeles, Kaspar Althoefer, Thrishantha Nanayakkara, “Stiffness Imaging with a Continuum Appendage: Real-time Shape and Tip Force Estimation from Base Load Readings”, IEEE Robotics and Automation Letters (RAL), 2020. [PDF][Media]
- Sadati, SM Hadi, S. Elnaz Naghibi, Ali Shiva, Brendan Michael, Ludovic Renson, Matthew Howard, Caleb D. Rucker et al. "TMTDyn: A matlab package for modeling and control of hybrid rigid–continuum robots based on discretized lumped systems and reduced-order models." The International Journal of Robotics Research (2019): 0278364919881685 (IJRR). PDF
- Sadati, Seyedmohammadhadi, Ali Shiva, Seyedeh Elnaz Naghibi, D. Caleb Rucker, Ludovic Renson, Christos Bergeles, Kaspar Althoefer, Thrishantha Nanayakkara, Helmut Hauser, and Ian D. Walker. "Reduced Order vs. Discretized Lumped System Models with Absolute and Relative States for Continuum Manipulators." In Robotics: Science and Systems (RSS), p. 10. 2019. [PDF]
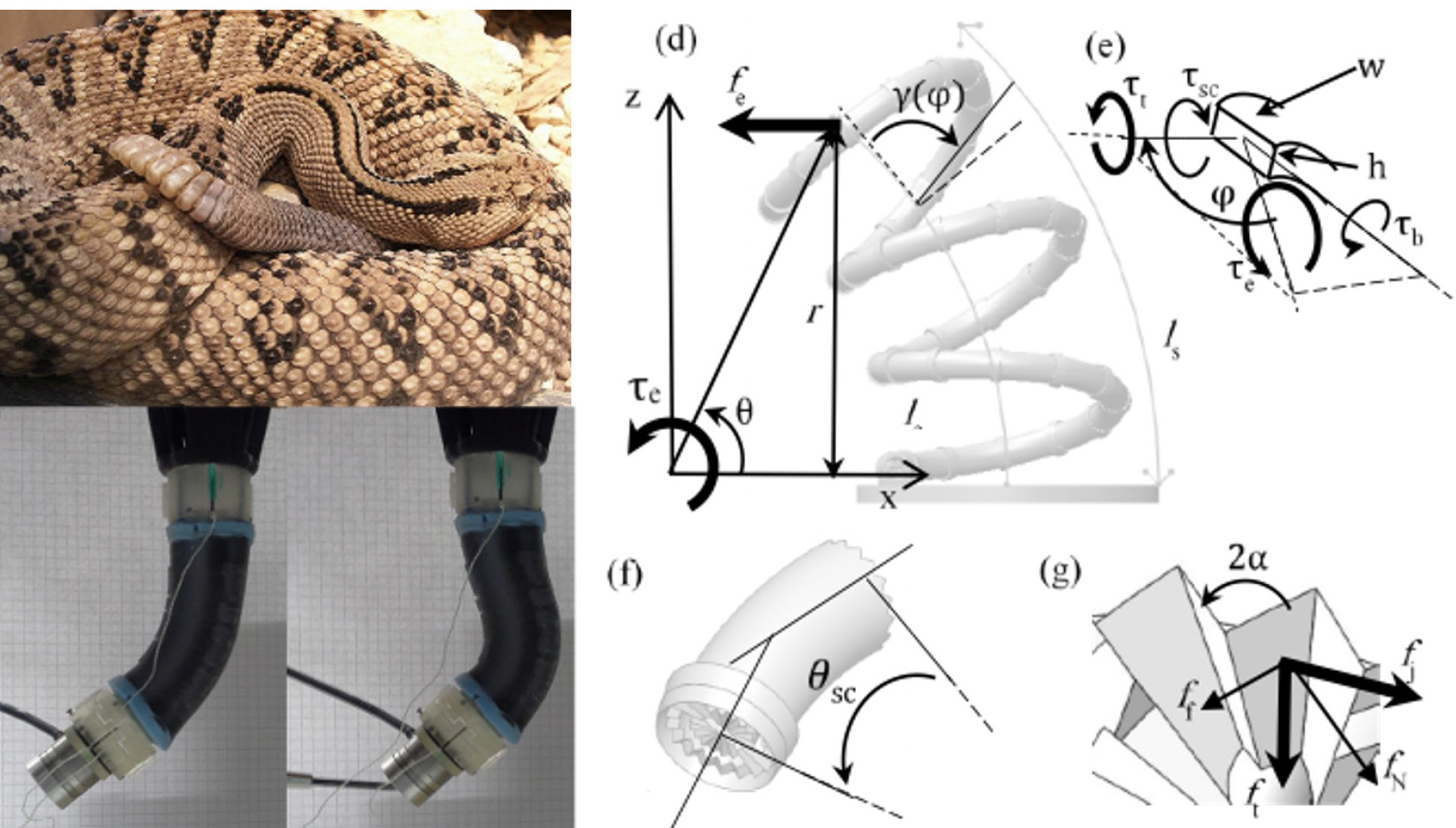
- Seyedmohammadhadi Sadati, Luis Sullivan, Ian Walker, Kaspar Althoefer, Thrishantha Nanayakkara “3D-Printable Thermoactive Helical Interface with Decentralized Morphological Stiffness Control for Continuum Manipulators”, IEEE Robotics and Automation Letters (RA-L), vol. 3, no. 3, pp.2283 – 2290, 2018. PDF
- Seyedmohammadhadi Sadati, Luis Sullivan, Ian Walker, Kaspar Althoefer, Thrishantha Nanayakkara “3D-Printable Thermoactive Helical Interface with Decentralized Morphological Stiffness Control for Continuum Manipulators”, ICRA2018 PDF
- Sadati, S. H., Naghibi, S. E., Althoefer, K., & Nanayakkara, T. (2018, April). Toward a low hysteresis helical scale Jamming interface inspired by teleost fish scale morphology and arrangement. In 2018 IEEE International Conference on Soft Robotics (RoboSoft) (pp. 455-460). IEEE. (first IEEE International Conference on Soft Robotics) PDF
- Sadati, S.M., Naghibi, S.E., Shiva, A., Noh, Y., Gupta, A., Walker, I.D., Althoefer, K. and Nanayakkara, T., 2017. A geometry deformation model for braided continuum manipulators. Frontiers in Robotics and AI, 4, p.22, 2017 PDF.
- Sadati, S.H., Naghibi, S.E., Walker, I.D., Althoefer, K. and Nanayakkara, T., 2018. Control Space Reduction and Real-Time Accurate Modeling of Continuum Manipulators Using Ritz and Ritz–Galerkin Methods. IEEE Robotics and Automation Letters, 3(1), pp.328-335. PDF
- Sadati, S.H., Naghibi, S.E., Shiva, A., Walker, I.D., Althoefer, K. and Nanayakkara, T., 2017, July. Mechanics of Continuum Manipulators, A Comparative Study of Five Methods with Experiments. In Conference Towards Autonomous Robotic Systems (pp. 686-702). Springer, Cham. PDF
- Seyedmohammadhadi Sadati, Ali Shiva, Ahmad Ataka, Seyedeh Elnaz Naghibi, Ian Walker, Kaspar Althoefer, and Thrishantha Nanayakkara, “A Geometry Deformation Model for Compound Continuum Manipulators with External Loading”, IEEE International Conference on Robotics and Automation (ICRA), pp. 4957 – 4962, DOI: 10.1109/ICRA.2016.7487702, 2016. PDF
- Sadati, SM Hadi, Yohan Noh, S. Elnaz Naghibi, Althoefer Kaspar, and Thrishantha Nanayakkara. “Stiffness Control of Soft Robotic Manipulator for Minimally Invasive Surgery (MIS) Using Scale Jamming.” In Intelligent Robotics and Applications, pp. 141-151. Springer International Publishing, pp. 141 – 151, 2015. PDF
- Jiang, Allen, Tommaso Ranzani, Giada Gerboni, Laura Lekstutyte, Kaspar Althoefer, Prokar Dasgupta, and Thrishantha Nanayakkara. “Robotic Granular Jamming: Does the Membrane Matter?.” Soft Robotics, 1(3): pp. 192-201. doi:10.1089/soro.2014.0002, 2014. PDF
- M. Cianchetti and T. Ranzani, G. Gerboni, T. Nanayakkara, K. Althoefer, P. Dasgupta, A. Menciassi, “Soft robotics technologies to address shortcomings in today’s minimally invasive surgery: the STIFF-FLOP approach”, Soft Robotics (SoRo), pp.122-131, vol. 1, no. 2, doi:10.1089/soro.2014.0001, 2014. PDF
- A. Jiang, G. Xynogalas, P. Dasgupta, K. Althoefer, and T. Nanayakkara, “Design of a variable stiffness flexible manipulator with composite granular jamming and membrane coupling,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.2922 – 2927, DOI: 10.1109/IROS.2012.6385696, Vilamoura, Portugal, 2012. PDF
- A. Jiang, J. Bimbo, S. Goulder, H. Liu, X. Song, and T. Nanayakkara, “Adaptive grip control on an uncertain object”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1161 – 1166, DOI: 10.1109/IROS.2012.6385922, Vilamoura, Portugal, 2012. PDF
- A. Jiang, A. Ataollahi, K. Althoefer, P. Dasgupta, and T. Nanayakkara, “A variable stiffness joint by granular jamming,” ASME 2012 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC 2012), pp. 267-275, Chicago, IL, USA, 2012. PDF
- Godage, Isuru S., Thrishantha Nanayakkara, and Darwin G. Caldwell. “Locomotion with continuum limbs.” In Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on, pp.293 – 298, DOI: 10.1109/IROS.2012.6385810, 2012. PDF
Contact the PI
Professor Thrishantha Nanayakkara
RCS1 M229, Dyson Building
25 Exhibition Road
South Kensington, SW7 2DB
Email: t.nanayakkara@imperial.ac.uk