Human-Robot Adaptation in Shared Control for Surgical Robots
Current telesurgical robots are typically commanded according to a master-slave scheme, where the surgeon at a console remotely controls the robot using visual feedback through the workstation. However, equipping the tools on the patient side with local sensors may provide better quality or complementary sensory information. Also, the surgeon's performance may decrease with fatigue, and in general robotic control should be adapted to the surgeon's specific sensorimotor abilities.
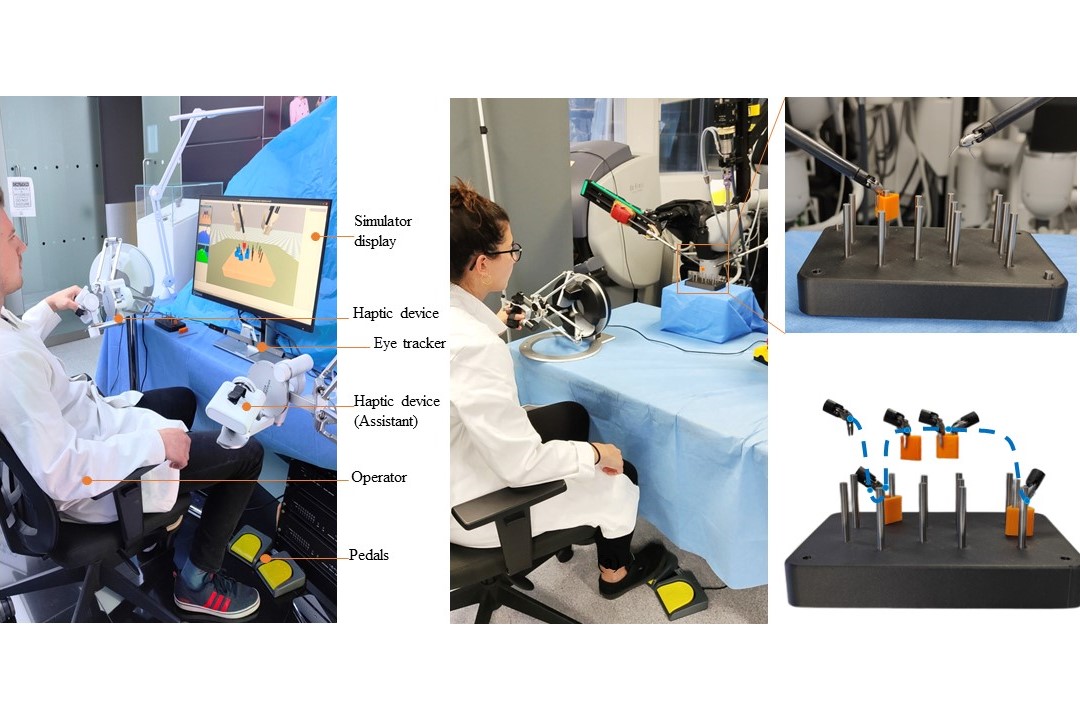
To address these issues, it is proposed to give to the robot some autonomy and regulating the human-robot interaction using shared control systems that interacts with the human operator, understands their control needs and adapts its assistance accordingly. This project will harness these advances to improve the control of a DaVinci robot by a human operator. The robot will be regulated based on shared control, by inferring the human operator motion intention from the interaction force detected at the haptic interface to command the robot.
Contact details
Prof. Ferdinando Rodriguez y Baena
Co-Director Hamlyn Centre, Professor in Medical Robotics
Prof. Brian Davies
Senior Research Investigator