Caption: The Manipulation and Touch Lab is based in the Department of Electrical and Electronic Engineering at Imperial College London.
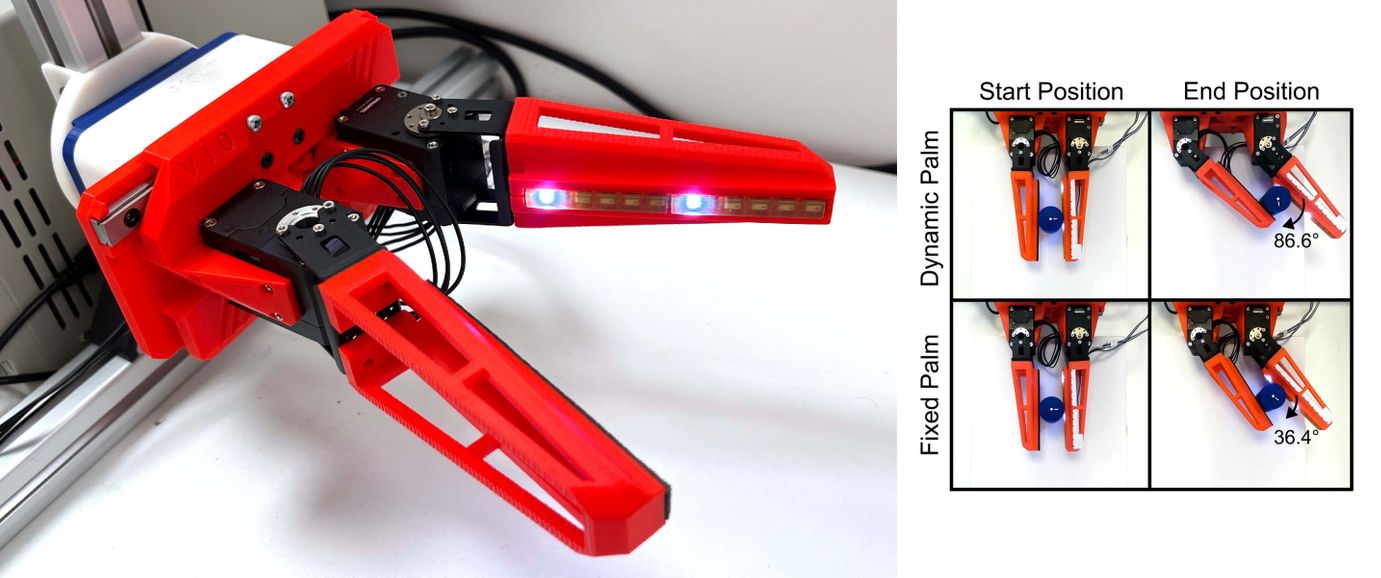
Caption: The E-TRoll robotic gripper using a variable width palm to enhance the rolling of objects between the fingers, exposing more of each object's surface to the embedded tactile sensors. This work will be presented at IROS 2022 in Kyoto.
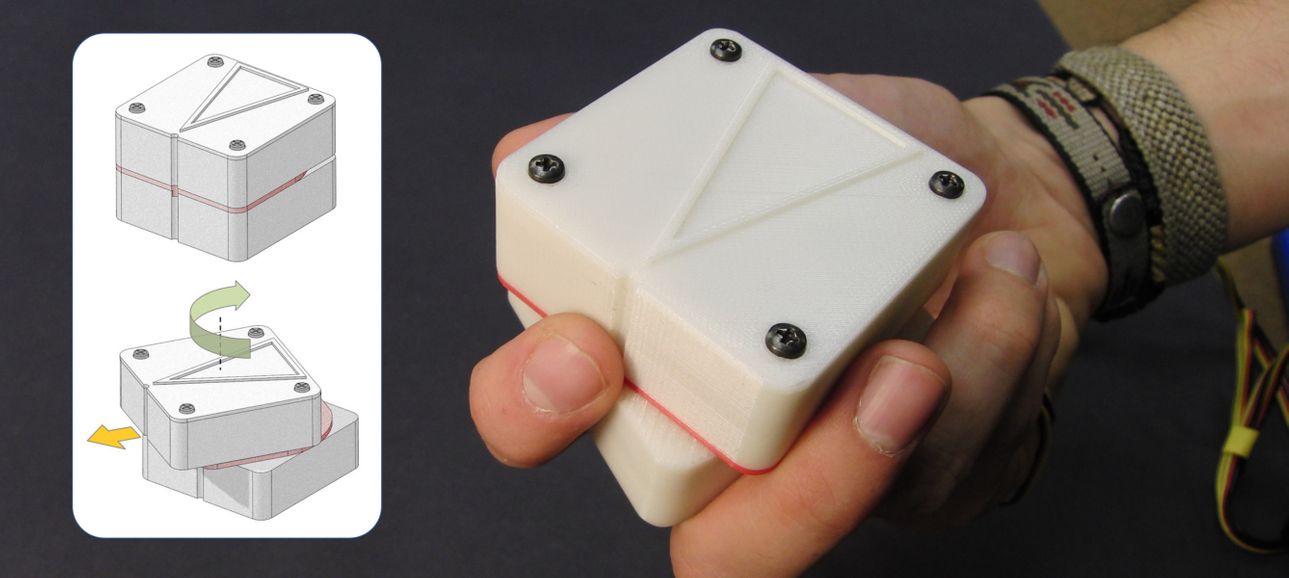
Caption: Shape-Changing haptic interfaces allow spatial information to be communicated by touch, but without the problems of other haptic methods.
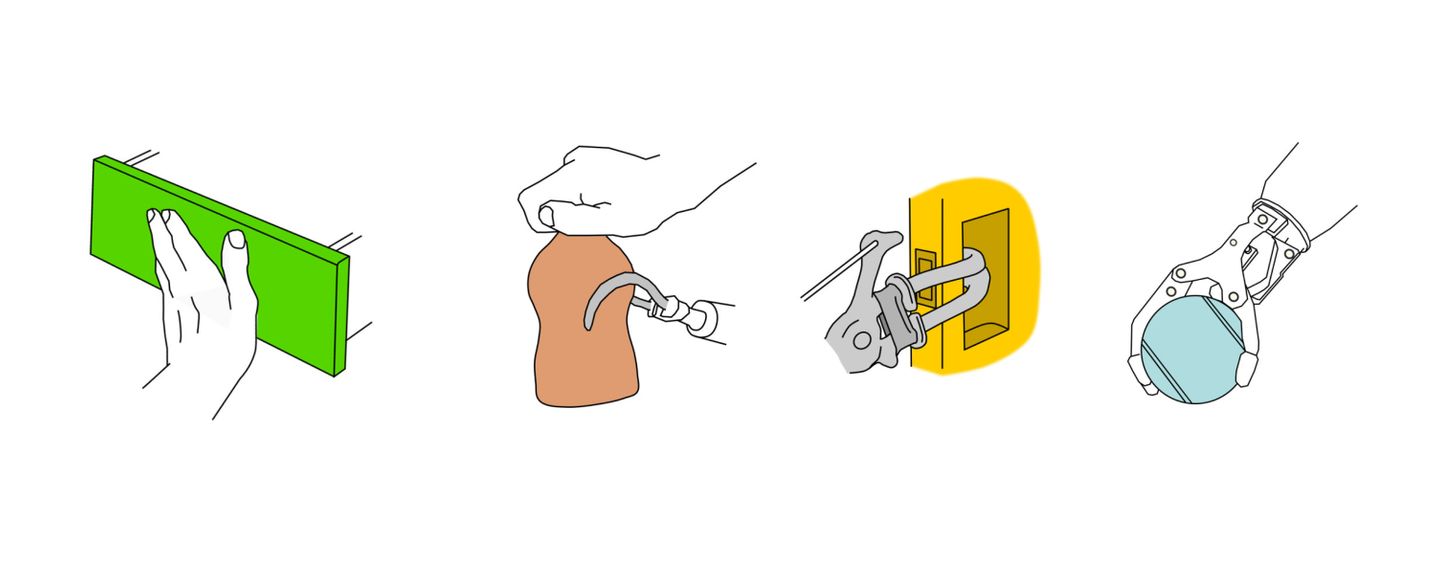
Caption: We study how people use their healthy, impaired and prosthetic upper limbs. Our findings help improve prosthetic technology and medical interventions.
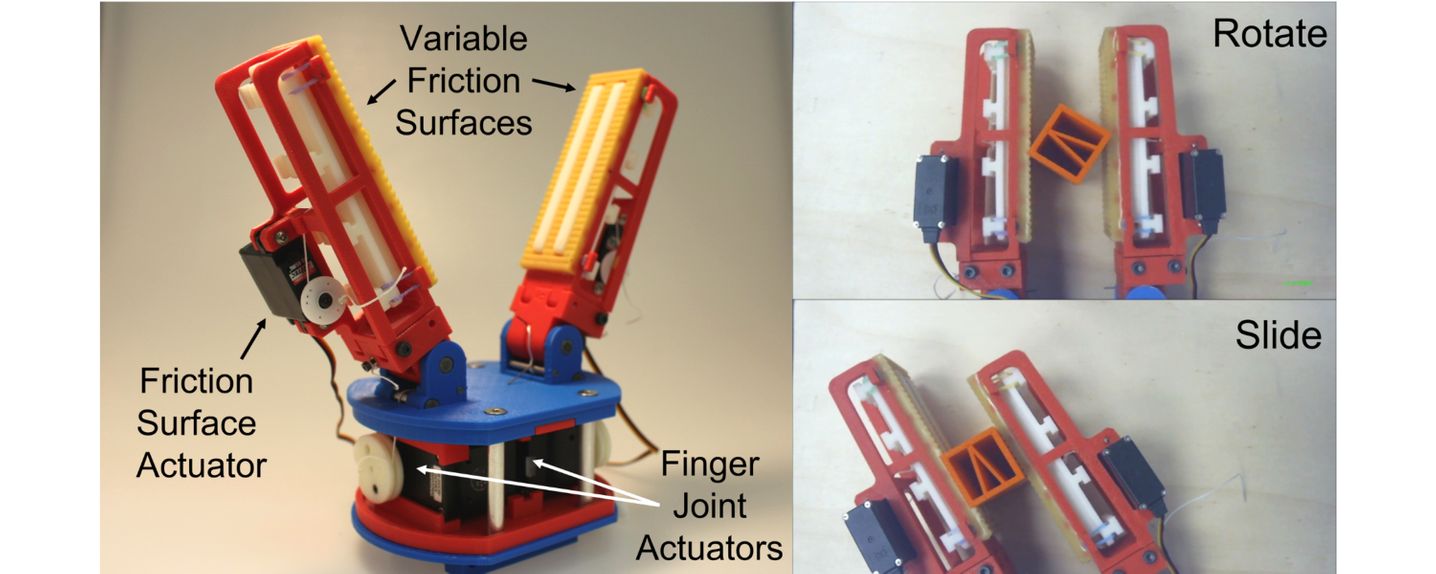
Caption: Variable-Friction robot fingers enable in-hand-manipulation using simple hand designs with low degrees of freedom. This hand can translate and rotate objects, despite only having two joints.
Lab overview
The Manipulation and Touch Lab investigates manipulation in humans and robots, haptic sensing, haptic interfaces and machine learning.